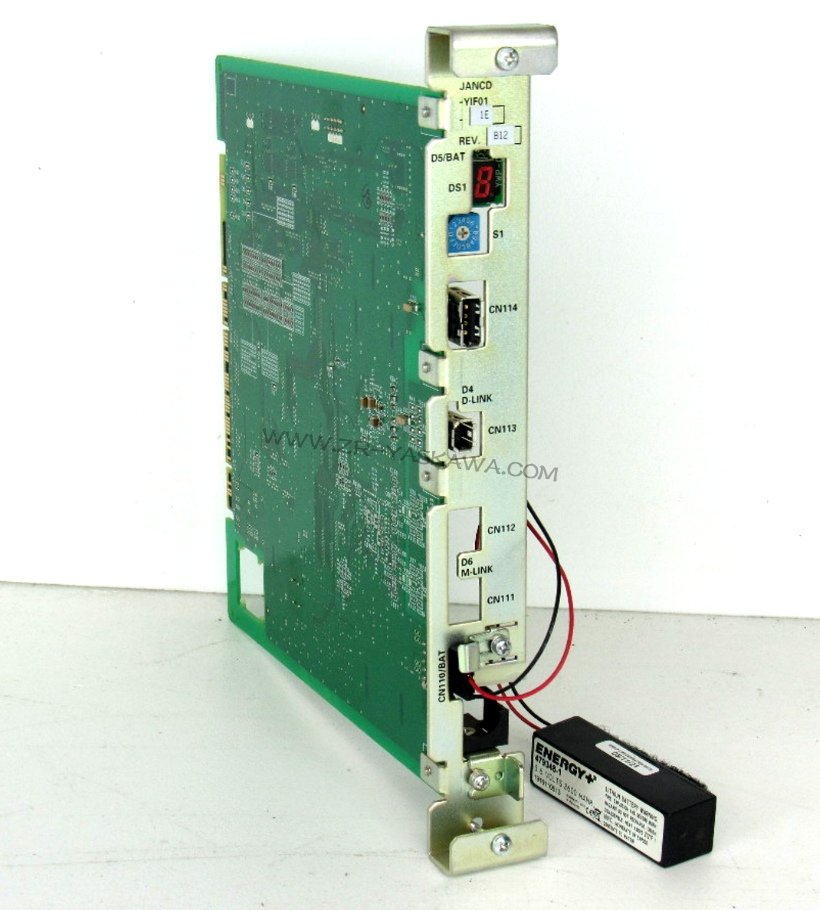
在区分安川机器人维修I/F基板芯片损坏究竟是源于硬件故障还是软件问题时,可以遵循一套系统化的分析流程,该流程细分为以下几个关键步骤:
观察与初步测试
在机器人电源开启前后的关键时刻,应细致检查电路板,寻找任何可能的烧毁痕迹或异常气味,这些往往是硬件受损的直接证据。利用精密的电压表,对电路板上的关键测试点进行逐一检测,确保电压值处于正常范围内。也不应忽视电路板上的保险丝和继电器,它们的状态对于判断电路是否健康至关重要。
安川机器人故障代码分析
安川机器人自带的诊断系统分析故障的强大工具。通过读取并分析故障代码,可以初步判断故障的性质。在此过程中,务必准确区分硬件故障代码与软件配置错误,以免误导后续的诊断与修复工作。
组件级检测
若初步分析指向了特定的硬件组件,我们则需要对这些疑似故障元件进行深入的检测。这包括电阻、电容、晶体管等基础元件,以及更为复杂的集成电路芯片。对于后者,可能需要借助专业的测试设备,以确保其功能正常。
软件检查
软件层面的检查同样不容忽视。应仔细检查YASKAWA机器人维修的软件配置,确保所有参数和设置均准确无误。在必要时,尝试重新加载或更新软件,以排除因软件问题导致的故障。
安川机器人I/F基板常见的故障现象多种多样,包括但不限于:
- 开关老化或选型不当,导致机器人开关频繁跳闸或无法合闸;
- 水泵卡死或电机内部短路,同样可能引发开关故障;
- 线路老化、短路或用线规格不当,也是导致开关问题的常见原因;
- 接触器噪音大,可能是由于接触面不平整,存在沙粒或生锈现象;
- 热继电器频繁跳闸,可能与机器人伺服电机过载、选型不匹配或线路老化有关;
- 接触器或中继吸合异常,可能是由于线圈断路或继电器头损坏;
- 变频器频繁报警,可能与参数设置错误、变频器老化、水泵过载、缺相或线路松动等因素有关;
- YASKAWA机器人维修控制器输入输出点异常,可能是由于长期频繁动作导致触点烧毁。
针对安川机器人I/F基板芯片损坏维修,可以采取以下YASKAWA机器人维修步骤:
- 检查电源供应:首先确保机器人的电源线、电源开关及电源适配器等部件均处于正常状态,电源线连接牢固,开关正常开启,适配器输出满足机器人电源需求。
- 确定故障位置:根据机器人故障代码或报警信息,初步判断故障可能发生的区域,如电路板、连接线、传感器等。
- 目测检查:对I/F基板进行直观的视觉检查,寻找任何可能的物理损坏迹象。
- 万用表检测:利用万用表对I/F基板的关键点进行电压、电流和电阻的测量,通过测量值的变化判断是否存在短路、开路等问题。
- 示波器检测:对于机器人电路板上的信号波形,可以使用示波器进行更为精细的检测和分析。
- 更换元件:一旦确认某个元件损坏,应立即使用同型号的元件进行更换。
- 固件/软件更新:在某些情况下,电路板的问题可能与工业机器人的固件或软件相关。我们应定期检查是否有可用的固件或软件更新,并及时进行安装,以解决可能存在的硬件兼容性问题。