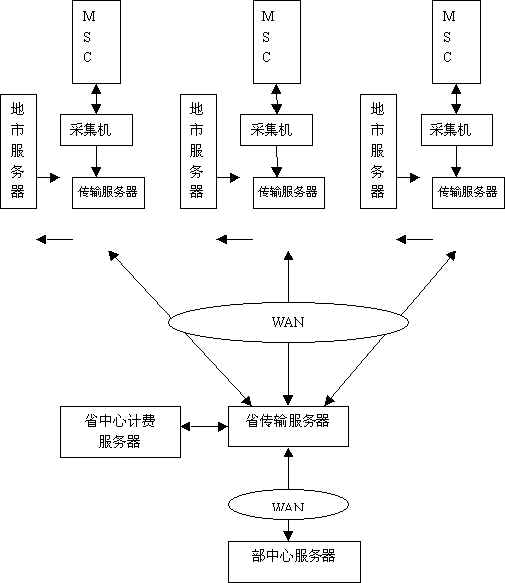
本高速公路视频超速监控系统利用视频图像处理技术,对高速公路车道上的汽车进行非接触式监控,获得超速车辆车速、车牌号码、违章照片等运行状态信息,可应用于高速公路治理、逃逸车辆抓捕等场合。1 系统结构高速公路视频超速监控系统的硬件结构如图1所示。它由超速监控摄像头和现场计算机等部分组成。在高速公路上安装监控摄像头(一个彩色全景摄像机、n个车道级彩色摄像机)及超速监控计算机,24小时实时监控高速公路上所有通过车辆的车速信息。系统软件包含超速车辆检测和自动车牌识别两部门。超速监控计算机通过实时视频采集卡首先采集高速公路的全景图像,并利用全景图像进行超速车辆检测;如检测到违章车辆,启动相应车道的摄像机工作,采集近景图像并用利近景图像自动车牌识别,其识别结果可分车牌号码字符、车牌号码照片、汽车违章照片分别修配存到超速违章车辆数据库,以供事后处理;如需要,还可通过无线、有线或光纤通信网自动向高速公路收费站的违章处理服务器传送违章车辆的车牌号码、违章照片信息,以实时进行违章处理。软件系统功能框图如图2所示。2 软件功能实现2.1 动目标分割[1][2]理想情况下,从视频图像进行超速车辆检测时,可以直接用帧间差的方法比较前后两帧图像,去除静止的区域,保留运动区域,判定视场中是否存在着汽车,判定汽车的运动轨迹及速度。但是在实际的成像过程中,场景中的诸多因素,包括照明情况、场景中物体的几体外形和物理性质(非凡是表面的反射性质)、成像系统的特性以及光源、物休和成像系统之间的空间关系等,都被综合为单一图像中像素点的灰度值;由于空间的强辐射、光照的变化和传感器本身的光学特性等原因,会在每一帧图像中产生较强的干扰和噪声。因此,在进行图像检查前对图像进行基于平均法去噪的初始背景获得和基于Kalman滤波[3]的实时背景更新等预处理;然后采用提取函数[4]分割目标与背景。
本高速公路视频超速监控系统利用视频图像处理技术,对高速公路车道上的汽车进行非接触式监控,获得超速车辆车速、车牌号码、违章照片等运行状态信息,可应用于高速公路治理、逃逸车辆抓捕等场合。1 系统结构高速公路视频超速监控系统的硬件结构如图1所示。它由超速监控摄像头和现场计算机等部分组成。在高速公路上安装监控摄像头(一个彩色全景摄像机、n个车道级彩色摄像机)及超速监控计算机,24小时实时监控高速公路上所有通过车辆的车速信息。系统软件包含超速车辆检测和自动车牌识别两部门。超速监控计算机通过实时视频采集卡首先采集高速公路的全景图像,并利用全景图像进行超速车辆检测;如检测到违章车辆,启动相应车道的摄像机工作,采集近景图像并用利近景图像自动车牌识别,其识别结果可分车牌号码字符、车牌号码照片、汽车违章照片分别修配存到超速违章车辆数据库,以供事后处理;如需要,还可通过无线、有线或光纤通信网自动向高速公路收费站的违章处理服务器传送违章车辆的车牌号码、违章照片信息,以实时进行违章处理。软件系统功能框图如图2所示。2 软件功能实现2.1 动目标分割[1][2]理想情况下,从视频图像进行超速车辆检测时,可以直接用帧间差的方法比较前后两帧图像,去除静止的区域,保留运动区域,判定视场中是否存在着汽车,判定汽车的运动轨迹及速度。但是在实际的成像过程中,场景中的诸多因素,包括照明情况、场景中物体的几体外形和物理性质(非凡是表面的反射性质)、成像系统的特性以及光源、物休和成像系统之间的空间关系等,都被综合为单一图像中像素点的灰度值;由于空间的强辐射、光照的变化和传感器本身的光学特性等原因,会在每一帧图像中产生较强的干扰和噪声。因此,在进行图像检查前对图像进行基于平均法去噪的初始背景获得和基于Kalman滤波[3]的实时背景更新等预处理;然后采用提取函数[4]分割目标与背景。
 找到匹配点后,利用两者视差和事前标定过的视场内图像最小分辨率所代的最小距离以及图像采集的间隔时间,就可计算出目标速度,根据此值猜测目标新位置并判定是否超速。 2.4 字符自动识别[8]轻易知道,式中0≤Ek(ck(x,y),rk(x,y)) ≤1。用提取函数对在公路上采集到的实际运动车辆的图像做动目标检测,其实验结构如图3所示。2.2 动目标跟踪及速度测量[5]在目标跟踪的同时,需要判定计算目标的运动速度,所以采用特征点匹配的方法进行动目标跟踪,以便利用特征点的视差计算车速。其要点是:在一帧图像的活动目标窗口中选择一组具有不变性质的特征点,与下一帧图像中的同类特征点作匹配,从而求得视差。这就是特征点匹配的方法。
找到匹配点后,利用两者视差和事前标定过的视场内图像最小分辨率所代的最小距离以及图像采集的间隔时间,就可计算出目标速度,根据此值猜测目标新位置并判定是否超速。 2.4 字符自动识别[8]轻易知道,式中0≤Ek(ck(x,y),rk(x,y)) ≤1。用提取函数对在公路上采集到的实际运动车辆的图像做动目标检测,其实验结构如图3所示。2.2 动目标跟踪及速度测量[5]在目标跟踪的同时,需要判定计算目标的运动速度,所以采用特征点匹配的方法进行动目标跟踪,以便利用特征点的视差计算车速。其要点是:在一帧图像的活动目标窗口中选择一组具有不变性质的特征点,与下一帧图像中的同类特征点作匹配,从而求得视差。这就是特征点匹配的方法。 式中,i=n-2,...,n+2;j=m-2,...,m+2;m,n为窗口中心像元的行、列序列,gij为(i,j)处图像的灰度值。然后,确定备选特征点,若像元的有利值M大于经验阈值,则该像元为备选特征点;否则,该像元不是特征点。最后,用抑制局部非最大M值的方法,确定特征点。检验每个备选特征点的M值是否为一定大小(5х5,7х7,9х9)窗口内的最大值,假如在窗口内有几个备选特征点,则取M值最大的像元作为特征点,其余均去掉。为保证匹配的正确率,采用协方差最大与差的绝对值之和最小作为双重判据,决定匹配点的取愉快,以增强匹配结果的可靠性。
式中,i=n-2,...,n+2;j=m-2,...,m+2;m,n为窗口中心像元的行、列序列,gij为(i,j)处图像的灰度值。然后,确定备选特征点,若像元的有利值M大于经验阈值,则该像元为备选特征点;否则,该像元不是特征点。最后,用抑制局部非最大M值的方法,确定特征点。检验每个备选特征点的M值是否为一定大小(5х5,7х7,9х9)窗口内的最大值,假如在窗口内有几个备选特征点,则取M值最大的像元作为特征点,其余均去掉。为保证匹配的正确率,采用协方差最大与差的绝对值之和最小作为双重判据,决定匹配点的取愉快,以增强匹配结果的可靠性。

 为把字符分为单个字符,以送入识别系统识别,在字符图像二值化后,进行字符切分。利用车牌字符固定的高宽比和间距作出先验知识,在分割前先估算出字符宽度、间距,并从图像数值方向的投影直方图定出字符的开始位置,切分全部字符;然后将文字外接边框按比例线性放大或缩小为规定的32х64大小。车牌字符识别系统的要害在于字符特征的提取,也就是如何选取既轻易提取又能为识别系统提供尽可能高的模式鉴别能力、同时还要尽量少的特征维数的特征向量,它应该是最佳的样本特征属性的度量。由于车牌字符共有七个字符:第一位是汉字,通常代表车辆所属省份,或是军种、警别等有特定含义的字符简称;第二位为大写的英文字符,一个圆点间隔后的第三个字符是英文字母或是数字,其余的四位为数字。车牌字符识别与一般文字识别在于它的字符数有限,汉字共约50多个,大写英文字母26个,数字10个。为实时识别考虑,特征向量的维数可适当选择较低的维数。系统采用投影-Fourier变换特征、网格特征和轮廓特片组成字符特征向量[9],与模拟中的向量进行特征匹配。特征匹配选用最小距离匹配法。经大量图像实验,有较高的识别率。
为把字符分为单个字符,以送入识别系统识别,在字符图像二值化后,进行字符切分。利用车牌字符固定的高宽比和间距作出先验知识,在分割前先估算出字符宽度、间距,并从图像数值方向的投影直方图定出字符的开始位置,切分全部字符;然后将文字外接边框按比例线性放大或缩小为规定的32х64大小。车牌字符识别系统的要害在于字符特征的提取,也就是如何选取既轻易提取又能为识别系统提供尽可能高的模式鉴别能力、同时还要尽量少的特征维数的特征向量,它应该是最佳的样本特征属性的度量。由于车牌字符共有七个字符:第一位是汉字,通常代表车辆所属省份,或是军种、警别等有特定含义的字符简称;第二位为大写的英文字符,一个圆点间隔后的第三个字符是英文字母或是数字,其余的四位为数字。车牌字符识别与一般文字识别在于它的字符数有限,汉字共约50多个,大写英文字母26个,数字10个。为实时识别考虑,特征向量的维数可适当选择较低的维数。系统采用投影-Fourier变换特征、网格特征和轮廓特片组成字符特征向量[9],与模拟中的向量进行特征匹配。特征匹配选用最小距离匹配法。经大量图像实验,有较高的识别率。
新闻热点






疑难解答